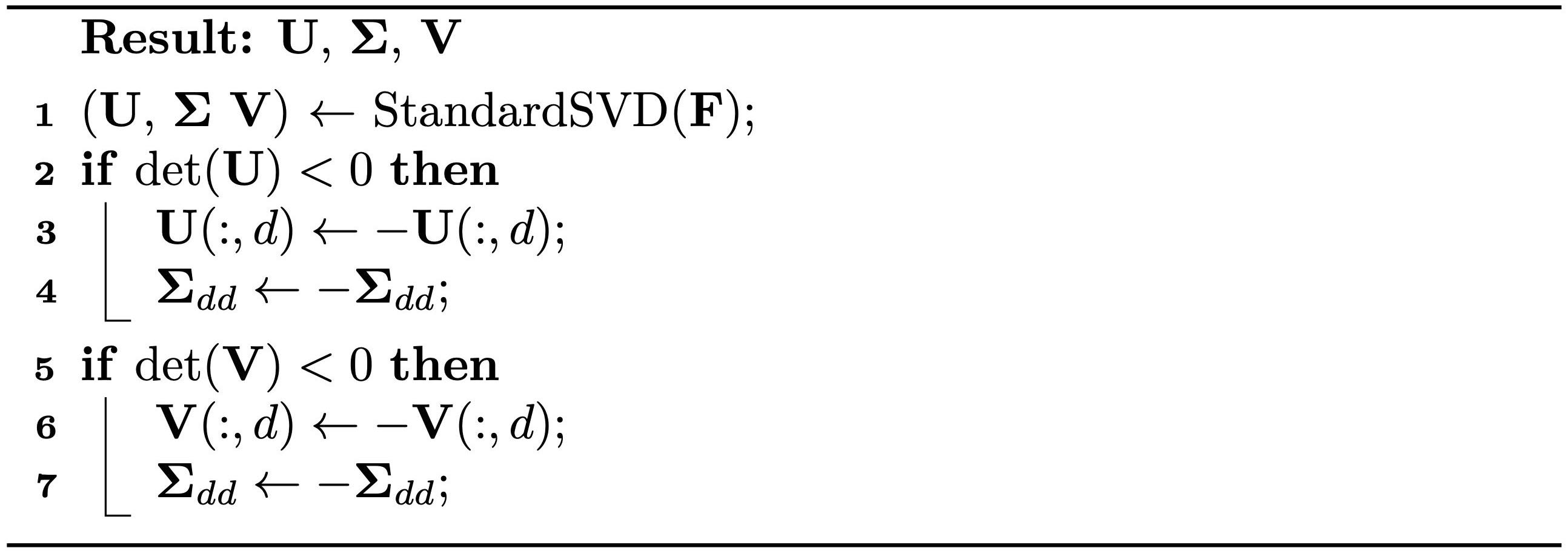
Polar Singular Value Decomposition
When discussing general slip boundary conditions, we introduced the usage of singular value decomposition (SVD). Here, we apply a variant known as Polar SVD (Algorithm 13.2.1) to decompose : where and are both rotation matrices, and is a diagonal matrix. Unlike standard SVD, which ensures remains non-negative possibly at the expense of having or , Polar SVD maintains and , allowing to be negative if necessary.
Polar SVD is named for its relation to Polar decomposition, where is expressed as . This decomposition can be reconstructed via and , with representing the closest rotation to and being symmetric.
The Polar SVD of offers a more intuitive way to understand deformation. If we denote , referred to as the principal stretches, we can conceptualize as comprising a sequence of transformations. Initially, there is a rotation by , followed by scaling the dimensions by along each axis, and concluding with another rotation by . This decomposition is applicable for all possible .
Polar SVD also allows for the more convenient expression of isotropic strain energy density functions using exclusively. For instance, our intuitive formulation in Equation (13.1.1) can be reframed as:
where . Moreover, the Neo-Hookean strain energy density function (Equation (13.1.2)) can be rewritten as:
These two models are both consistent with linear elasticity under small deformation.
Definition 13.2.1 (Consistency to Linear Elasticity). To verify the consistency to linear elasticity of a strain energy density function , we just need to check whether the following relations all hold: Here , and if , otherwise it is .