Slope Friction
Now to implement friction for the slope, we start by implementing the functions that calculate , , and according to Equation (9.2.2), Equation (9.2.5), and Equation (9.2.6) respectively.
Implementation 10.2.1 (Friction helper functions, FrictionEnergy.py).
import numpy as np
import utils
epsv = 1e-3
def f0(vbarnorm, epsv, hhat):
if vbarnorm >= epsv:
return vbarnorm * hhat
else:
vbarnormhhat = vbarnorm * hhat
epsvhhat = epsv * hhat
return vbarnormhhat * vbarnormhhat * (-vbarnormhhat / 3.0 + epsvhhat) / (epsvhhat * epsvhhat) + epsvhhat / 3.0
def f1_div_vbarnorm(vbarnorm, epsv):
if vbarnorm >= epsv:
return 1.0 / vbarnorm
else:
return (-vbarnorm + 2.0 * epsv) / (epsv * epsv)
def f_hess_term(vbarnorm, epsv):
if vbarnorm >= epsv:
return -1.0 / (vbarnorm * vbarnorm)
else:
return -1.0 / (epsv * epsv)
With these terms available, we can then implement the semi-implicit friction energy value, gradient, and Hessian computations according to Equation (9.2.1), Equation (9.2.3), and Equation (9.2.4) respectively.
Implementation 10.2.2 (Friction value, gradient, and Hessian, FrictionEnergy.py).
def val(v, mu_lambda, hhat, n):
sum = 0.0
T = np.identity(2) - np.outer(n, n) # tangent of slope is constant
for i in range(0, len(v)):
if mu_lambda[i] > 0:
vbar = np.transpose(T).dot(v[i])
sum += mu_lambda[i] * f0(np.linalg.norm(vbar), epsv, hhat)
return sum
def grad(v, mu_lambda, hhat, n):
g = np.array([[0.0, 0.0]] * len(v))
T = np.identity(2) - np.outer(n, n) # tangent of slope is constant
for i in range(0, len(v)):
if mu_lambda[i] > 0:
vbar = np.transpose(T).dot(v[i])
g[i] = mu_lambda[i] * f1_div_vbarnorm(np.linalg.norm(vbar), epsv) * T.dot(vbar)
return g
def hess(v, mu_lambda, hhat, n):
IJV = [[0] * 0, [0] * 0, np.array([0.0] * 0)]
T = np.identity(2) - np.outer(n, n) # tangent of slope is constant
for i in range(0, len(v)):
if mu_lambda[i] > 0:
vbar = np.transpose(T).dot(v[i])
vbarnorm = np.linalg.norm(vbar)
inner_term = f1_div_vbarnorm(vbarnorm, epsv) * np.identity(2)
if vbarnorm != 0:
inner_term += f_hess_term(vbarnorm, epsv) / vbarnorm * np.outer(vbar, vbar)
local_hess = mu_lambda[i] * T.dot(utils.make_PSD(inner_term)).dot(np.transpose(T)) / hhat
for c in range(0, 2):
for r in range(0, 2):
IJV[0].append(i * 2 + r)
IJV[1].append(i * 2 + c)
IJV[2] = np.append(IJV[2], local_hess[r, c])
return IJV
Note that in Numpy, matrix-matrix and matrix-vector products are realized by the dot() function.
For implicit Euler, and so .
Here mu_lambda stores for each node, where the normal force magnitude is calculated using at the beginning of each time step.
Implementation 10.2.3 (Use mu and lambda, time_integrator.py).
def step_forward(x, e, v, m, l2, k, n, o, contact_area, mu, is_DBC, h, tol):
x_tilde = x + v * h # implicit Euler predictive position
x_n = copy.deepcopy(x)
mu_lambda = BarrierEnergy.compute_mu_lambda(x, n, o, contact_area, mu) # compute mu * lambda for each node using x^n
# Newton loop
Implementation 10.2.4 (Compute mu and lambda, BarrierEnergy.py).
def compute_mu_lambda(x, n, o, contact_area, mu):
mu_lambda = np.array([0.0] * len(x))
for i in range(0, len(x)):
d = n.dot(x[i] - o)
if d < dhat:
s = d / dhat
mu_lambda[i] = mu * -contact_area[i] * dhat * (kappa / 2 * (math.log(s) / dhat + (s - 1) / d))
return mu_lambda
Since the slope is static, and the normal direction is the same everywhere, is constant and so can be discretized accurately.
Finally, we set friction coefficient and pass it to the time integrator where we add friction energy to model semi-implicit friction on the slope.
mu = 0.11 # friction coefficient of the slope
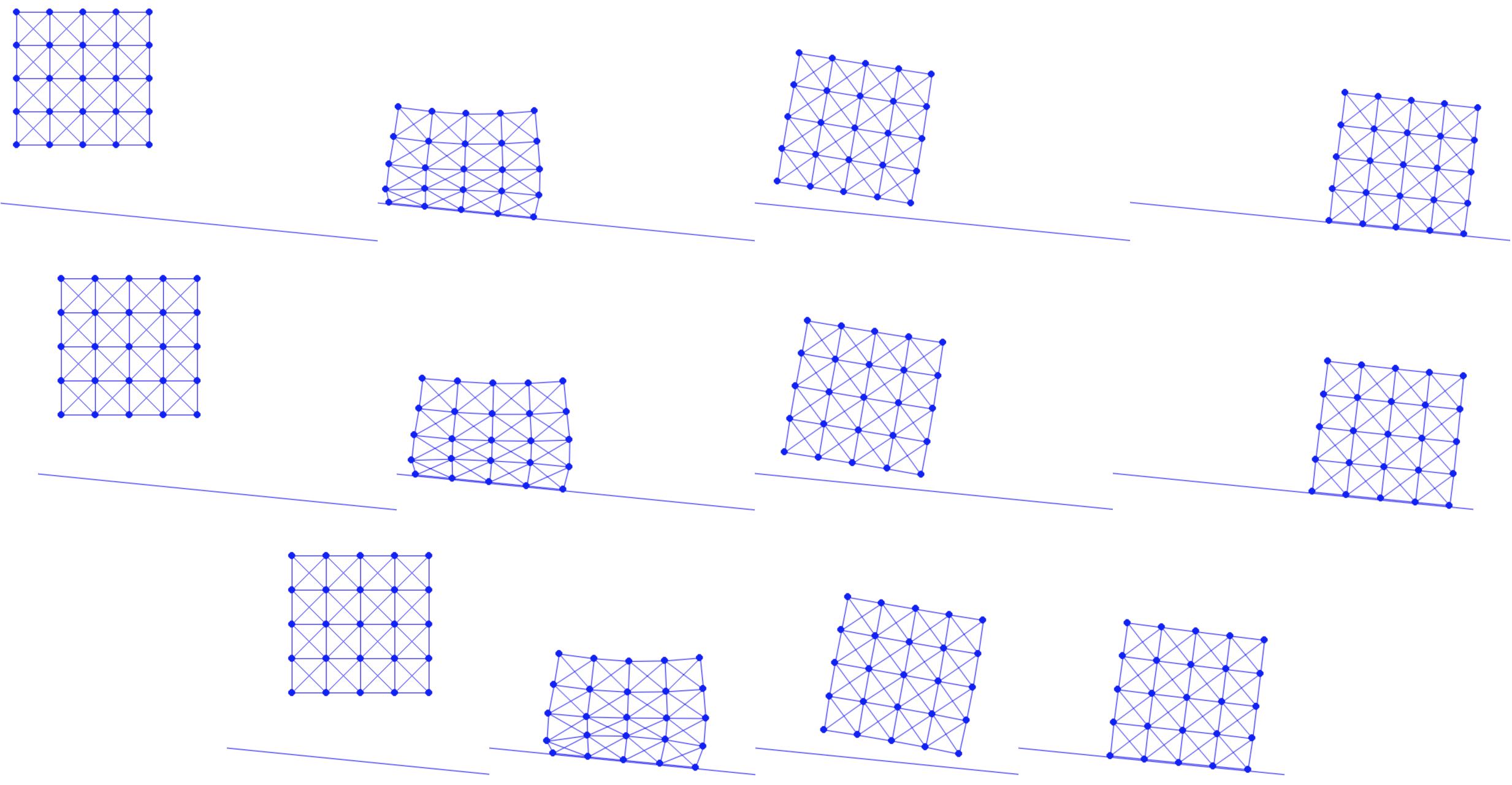
Now we are ready to test the simulation with different friction coefficients. Since our slope has an inclined angle with , we test , , and (Figure 10.2.1). Here we see that when , the critical value that provides dynamic friction forces in the same magnitude with that of the gravity component on the slope, the square keeps sliding after gaining the initial momentum (Figure 10.2.1 top). When we set , right above the critical value, the square slides a while and then stopped, showing that static friction is properly resolved (Figure 10.2.1 middle). With , the square stops even earlier (Figure 10.2.1 bottom).