Smooth Dynamic-Static Transition
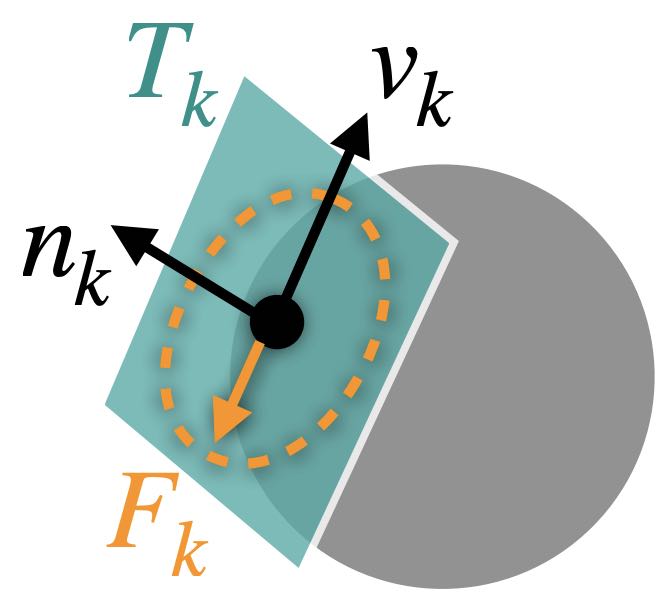
To model frictional contact, local frictional forces can be added for every active contact point pair . For each such pair , at the current state , a consistently oriented sliding basis can be constructed, where is the total number of simulated nodes and is the dimension of space, such that provides the local relative sliding velocity that is orthogonal to the distance gradient in the normal direction .
Example 9.1.1 (Particle Sliding on Sphere). For a particle with velocity moving on the surface of a sphere with velocity (no rotation), the relative sliding velocity here can be calculated as If we stack the velocity of the particle and the sphere for this system to obtain , we now know that is simply For more general cases like mesh-mesh contact, the form of only varies in how the relative velocity at the contact point pair is related to the velocity at the simulated nodes.
Maximizing dissipation rate subject to the Coulomb constraint defines friction forces variationally where is the contact force magnitude and is the local friction coefficient. This is equivalent to with when , while takes any unit vector orthogonal to when . In addition, the friction scaling function, , is also nonsmooth with respect to since when , and when . These non-smoothness would severely slow down and even break convergence of gradient-based optimization.
Remark 9.1.1 (Contact Force Magnitude). is the contact force magnitude because at node , the contact force is . Therefore, since and .
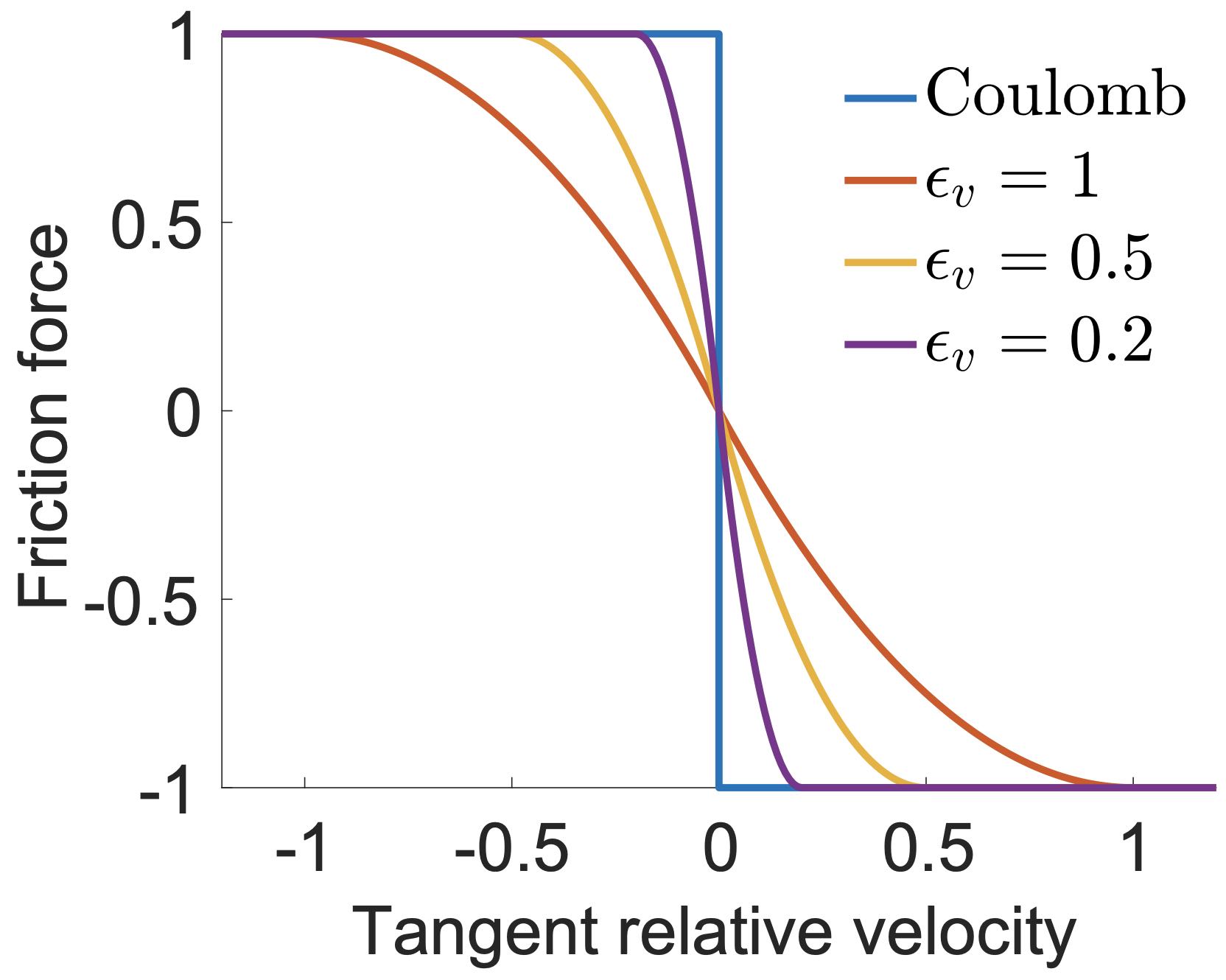
To enable efficient and stable optimization, the friction-velocity relation in the transition to static friction can be mollified by replacing with a smoothly approximated function. Following IPC, we use where and a velocity magnitude bound (in units of ) below which sliding velocities are treated as static is defined for bounded approximation error (Figure 9.1.2).